5.5. Backward ros
To use the backward_ros package for debugging your ROS2 project named OrbbecSDK_ROS2, you can follow these steps:
5.5.1. Add backward_ros as a dependency:
In your package.xml, add backward_ros as a dependency:
xml
<depend>backward_ros</depend>
5.5.2. Configure CMakeLists.txt:
In your CMakeLists.txt, find the backward_ros package and link it to your executable:
cmake
find_package(backward_ros REQUIRED)
include_directories(${backward_INCLUDE_DIRS})
add_executable(your_node src/your_node.cpp)
target_link_libraries(your_node ${backward_LIBRARIES})
5.5.3. Build your project with debug information:
Use colcon build with the RelWithDebInfo or Debug option to ensure that your executable is built with debug information:
colcon build --cmake-args '-DCMAKE_BUILD_TYPE=RelWithDebInfo'
5.5.4. Run your node:
After building, you can run your node as you normally would with ROS 2. If your node crashes, backward_ros will automatically generate a stack trace with detailed information, including line numbers, to help you debug the issue.
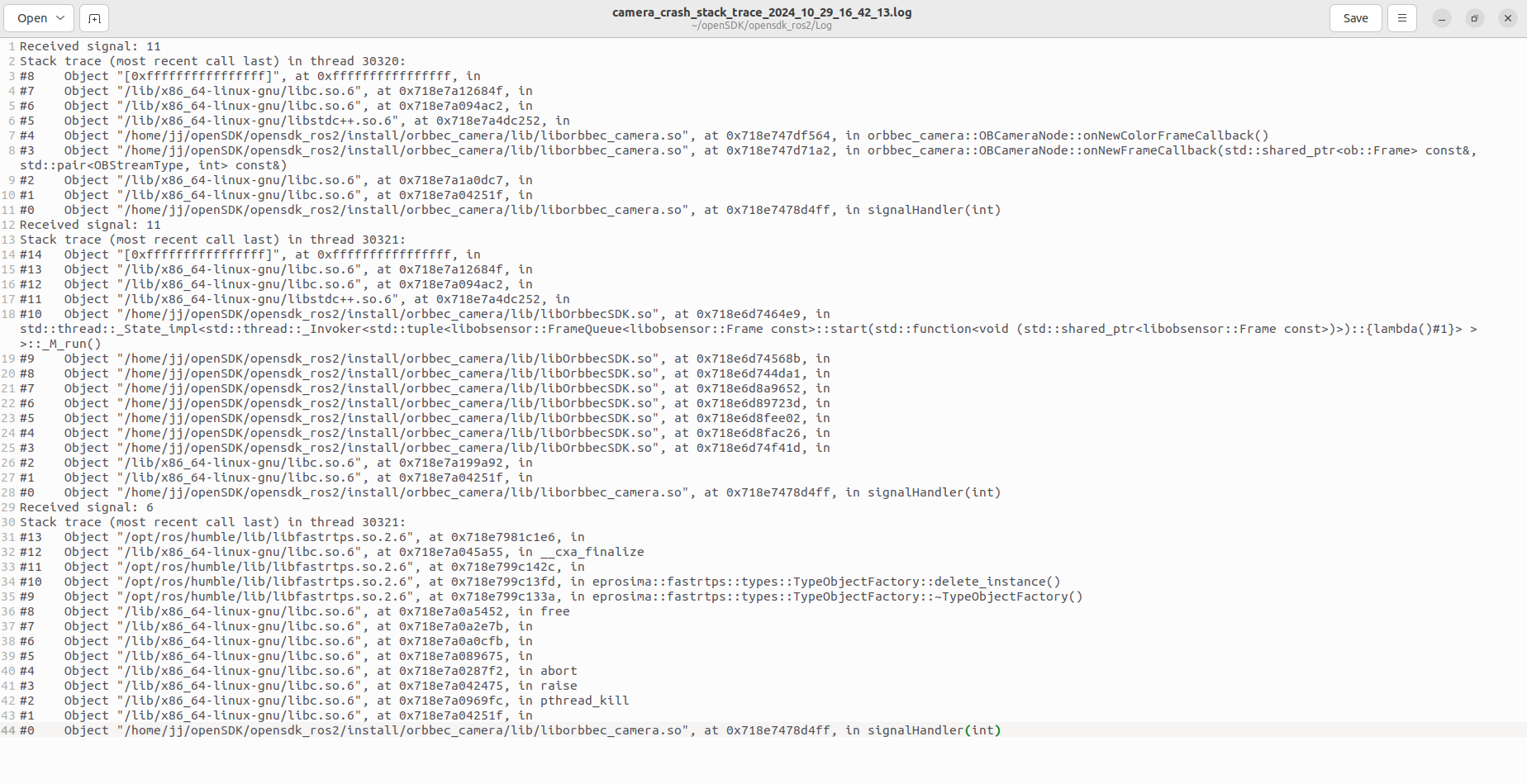
5.5.5. Example backward_ros
When your program crashes, you can go to the Log folder under the workspace to find the stack trace of the crash.