5.4. GDB debug
Debugging ROS 2 programs with GDB involves several steps:
5.4.1. Config debug
Set CMAKE_BUILD_TYPE to Debug in orbbec_camera/CMakeLists.txt
set(CMAKE_BUILD_TYPE Debug)
5.4.2. Use xterm terminal to open gdb debugging
Install xterm
sudo apt install xterm
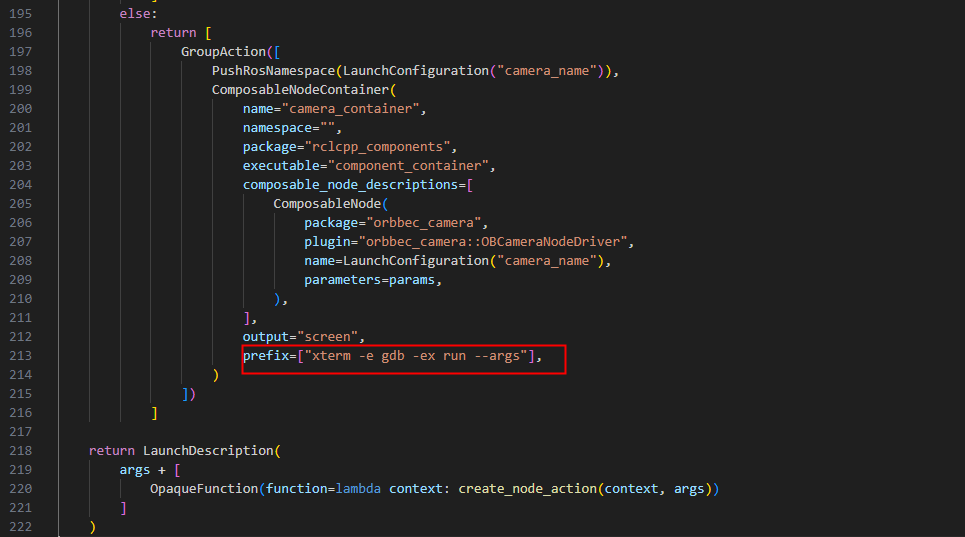
Take gemini_330_series.launch.py as an example to use xterm terminal to open gdb